In a groundbreaking study funded by the Defense Advanced Research Projects Agency (DARPA), researchers have demonstrated that a single human operator can effectively manage over 100 autonomous robots simultaneously while maintaining control and avoiding overload.
The research, published in IEEE Transactions on Field Robotics, challenges previous assumptions about human limitations in controlling multiple robots. During extensive field testing at Fort Campbell, Kentucky, operators successfully commanded swarms of up to 110 drones, 30 ground vehicles, and 50 virtual vehicles in complex urban environments.
"The complexity of the missions was unprecedented," says Julie A. Adams, Associate Director of Research at Oregon State University's Collaborative Robotics and Intelligent Systems Institute. The robots had to navigate physical urban terrain while responding to numerous virtual hazards and moving obstacles.
Despite the challenging conditions, human controllers only experienced brief periods of workload overload - approximately 3% of total mission time. These moments typically occurred when operators needed to develop new tactics or manage vehicle deployment from launch zones.
The findings have major implications for real-world applications like wildfire monitoring, where robot swarms could provide continuous surveillance of affected areas and help direct firefighting resources. The research may also influence future Federal Aviation Administration drone regulations.
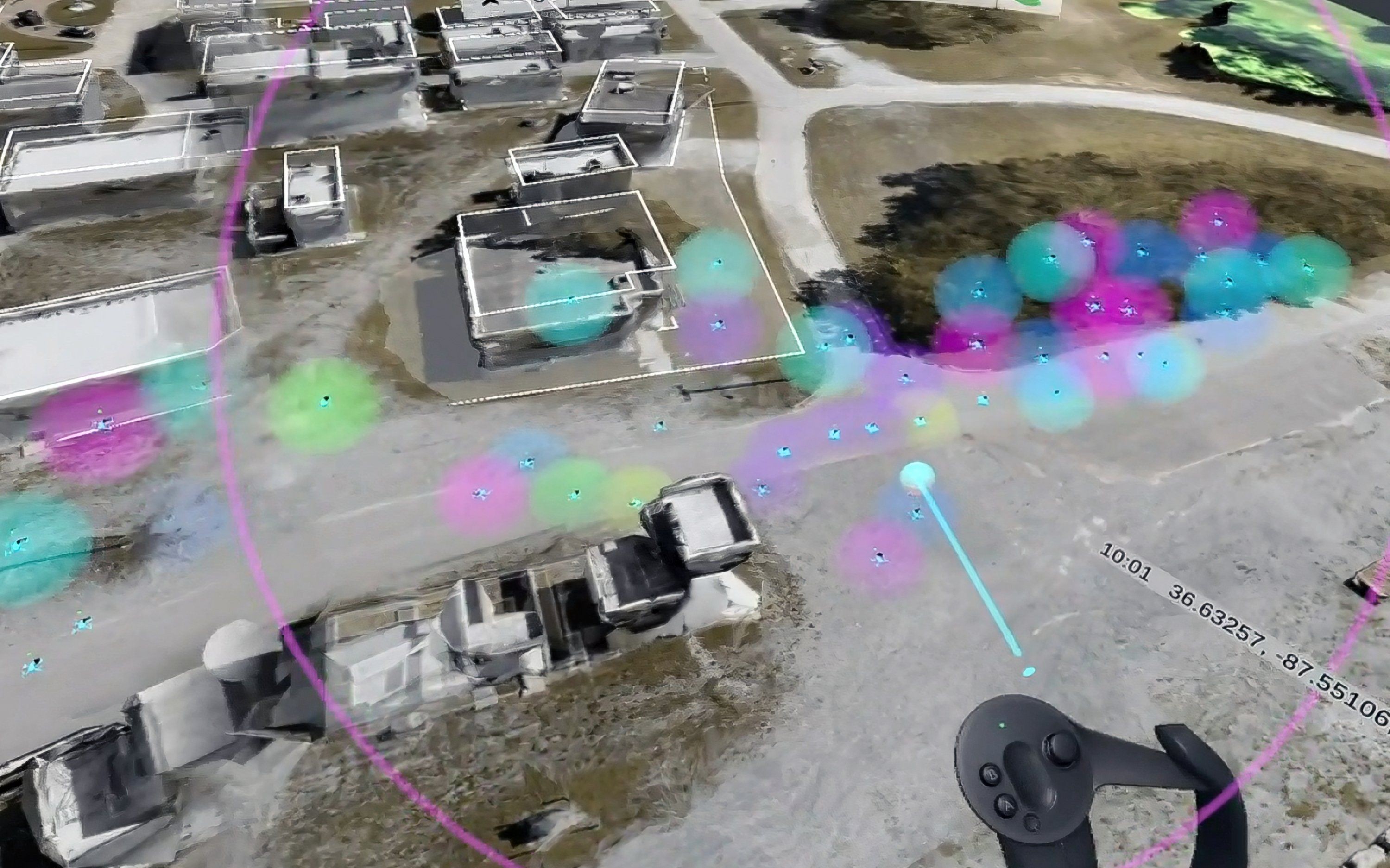
The three-week experiment involved two experienced swarm controllers working alternating shifts of 1.5 to 3 hours daily. Operators used virtual reconstructions of the environment to track and assign tasks to the robots while their physiological responses were monitored through sensors measuring heart rate, posture, and speech patterns.
This research overturns decades-old theories suggesting humans had very limited capacity to control multiple robots simultaneously. The results indicate that the sheer number of robots may be less important than other factors in determining successful swarm control.
The study opens new possibilities for deploying large-scale robotic systems in dangerous environments while maintaining effective human oversight. Future research will explore additional factors affecting swarm control performance, including system design and operator interface improvements.